
Upverter has some users building fantastic products. In this case, Peter Blom has built a flight controller for a drone. You can fork the design here.
Here’s a description of what he’s built.
My FC design is a flight controller for a quadcopter. It will keep the quad in the air using its onboard sensors and send back information about its position, orientation and other telemetry.
My idea was to build a quadcopter almost from scratch so that I could customize every little bit to my liking. My FC design for example is meant to be small yet still have all the sensors and I/O of bigger sized flight controllers. It has a Barometer(for altitude), Gyro/Accelerometer(for orientation) and a Magnetometer(Compass).
With the I/O ports it can connect to: a Radio receiver with telemetry capability, GPS receiver, Video transmitter, On screen display device which overlays a HUD on the video signal, Current & voltage sensor, ports for 8 speed controllers which in turn control the motors, 2 Servo connections for an optional Camera gimbal and some extra undefined pins which can be used as ADCs or extra serial connections.
I plan to build all the electronics using Upverter, most of which are already online.
The design is almost done, all I need to do is sort out the fiducials, add some graphics and fix the internal layer clearance to the edge of the board.
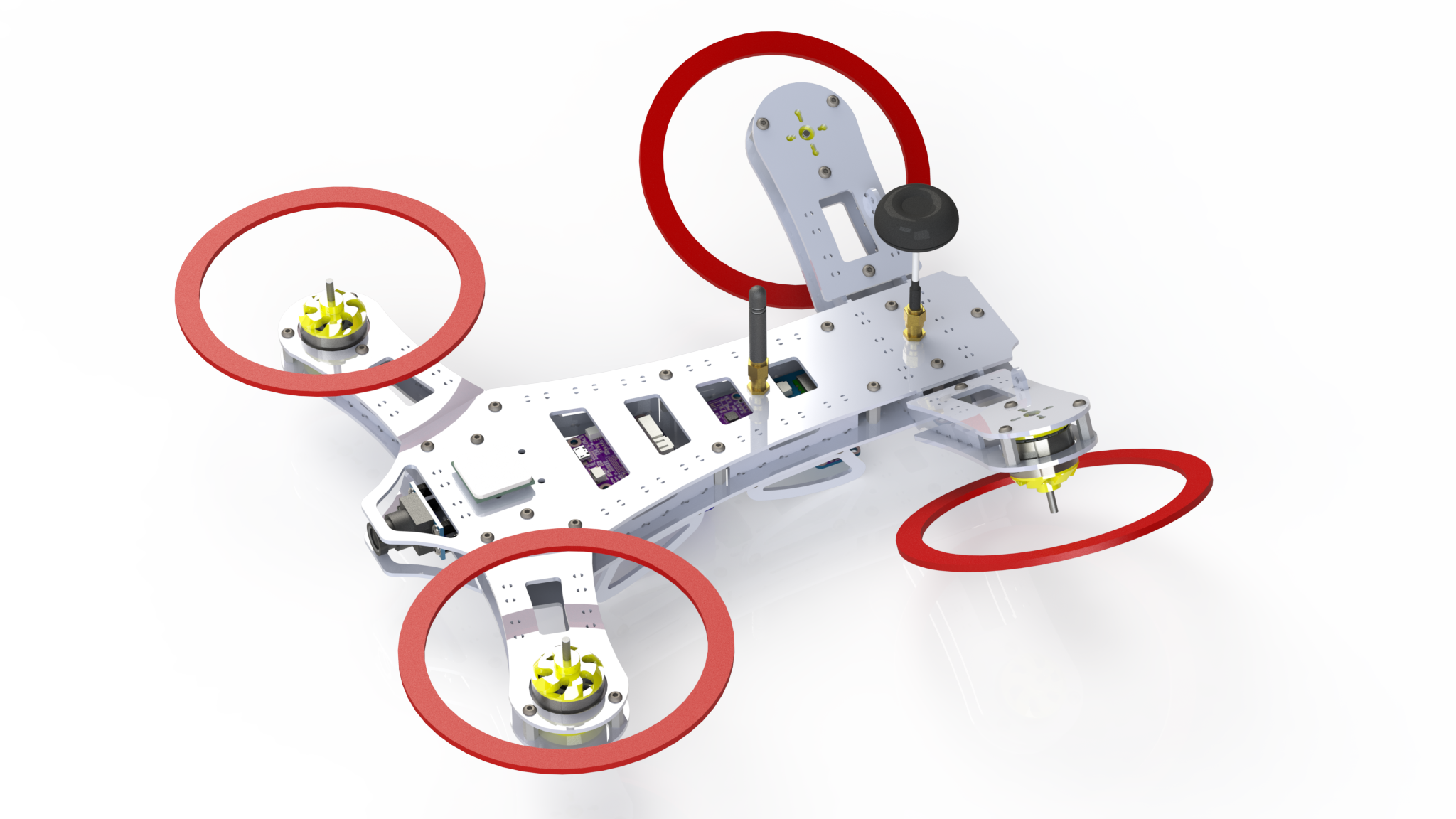
I have included a render of the quadcopter (seen above). The FC board can be seen behind the first two cutouts in the top plate.
Take a look at his design, and remember, you can share your own!